基于51单片机的步进电机控制系统设计与实现
随着工业自动化、智能家居及精密仪器等领域的飞速发展,步进电机作为一种将电脉冲信号转换为角位移或线位移的开环控制元件,凭借其定位精度高、无累积误差、控制简单等优点,得到了广泛应用。而作为经典且资源丰富的微控制器,51单片机以其低成本、高可靠性和成熟的开发环境,成为许多中小型控制系统开发的首选核心。本文将系统阐述基于51单片机的步进电机控制系统的研发过程,涵盖系统设计、硬件构成、软件实现及系统调试等关键环节。
一、系统总体设计
本系统的设计目标是通过51单片机实现对步进电机的精确控制,具体功能包括:电机的启动、停止、正反转控制、转速调节以及运行步数的精确设定。系统采用模块化设计思想,主要由控制核心模块、驱动模块、步进电机本体以及人机交互模块组成。控制核心(51单片机)负责接收指令、执行控制算法并输出相应的脉冲序列;驱动模块(如ULN2003或专用驱动芯片)将单片机输出的微弱信号进行功率放大,以驱动步进电机绕组;人机交互模块(如按键、数码管或LCD)则用于设定参数和显示状态。
二、硬件系统构成
- 控制核心(51单片机):选用如AT89S52或STC89C52等型号,利用其I/O口(如P1口)输出控制脉冲信号。其内部定时器/计数器用于产生精确的脉冲间隔,从而实现调速。
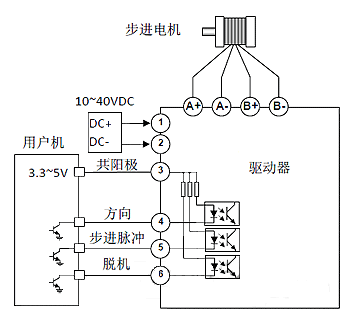
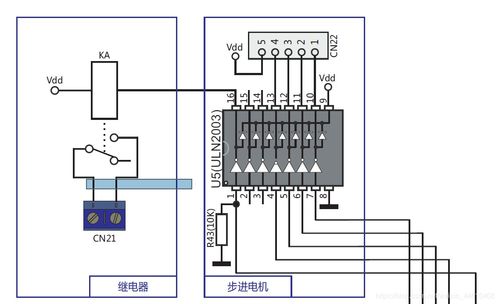
- 驱动电路:这是连接单片机与电机的关键桥梁。对于四相五线或四相六线制步进电机,常采用ULN2003达林顿晶体管阵列芯片。它集成了多个高电压、大电流的达林顿管,可直接驱动电机绕组,并内置续流二极管,为绕组断电时产生的反电动势提供泄放回路,保护单片机端口。
- 步进电机:根据负载需求选择合适的型号(如28BYJ-48减速步进电机),需明确其相数、步距角、额定电压电流等参数,这些决定了驱动方式与控制逻辑。
- 人机交互接口:采用独立式按键或矩阵键盘设置目标转速、转向和步数;通过数码管或1602液晶显示屏实时显示当前运行状态和设定参数。
- 电源模块:为单片机和驱动电路提供稳定、隔离的电源,通常单片机使用5V,而电机驱动电压可能更高(如12V),需注意共地处理。
三、软件控制系统实现
软件程序是系统的“大脑”,采用C语言在Keil开发环境下进行编写,程序流程主要包括初始化、主循环、中断服务等部分。
- 脉冲分配与驱动逻辑:根据电机的相数(如四相)和励磁方式(单四拍、双四拍、八拍),在程序中建立相应的控制字(顺序表)。单片机通过I/O口循环输出这些控制字,即可驱动电机按设定方向步进。改变输出控制字的顺序即可实现反转。
- 速度控制:电机的转速由脉冲频率决定。通过编程控制单片机定时器中断的周期,从而精确控制输出脉冲的频率。中断周期越短,脉冲频率越高,电机转速越快。可实现平滑的加速、减速过程。
- 位置控制:通过累计输出的脉冲数量,即可精确控制电机转动的角度或步数。当累计脉冲数达到预设目标值时,停止脉冲输出,电机即停于指定位置。
- 人机交互程序:编写按键扫描与去抖程序,响应用户输入并更新设定参数;编写显示驱动程序,将参数与状态信息清晰呈现。
四、系统调试与优化
系统搭建完成后,需进行联合调试。
- 分模块调试:先确保单片机最小系统、按键显示模块工作正常。然后单独测试驱动电路与电机,手动模拟脉冲序列观察电机转动是否正常。
- 软硬件联调:下载完整程序,测试各项控制功能。使用示波器观察I/O口输出的脉冲波形是否规整,频率是否准确。
- 性能优化与抗干扰:在软件中加入“软启动”(逐渐提高脉冲频率)以避免电机启动时失步;优化程序结构,提高响应速度;在硬件上,于电源入口、单片机复位端增加滤波电容,电机电源线与信号线分开走线,以增强系统抗电磁干扰能力。
五、结论
本文设计并实现了一套以51单片机为核心、ULN2003为驱动器的步进电机控制系统。该系统硬件结构简洁,成本低廉;软件控制灵活,能够实现步进电机的基本运动控制要求。通过此研发实践,不仅验证了51单片机在运动控制领域的可行性,也为后续集成更复杂功能(如通过串口与上位机通信、实现多轴联动等)奠定了坚实基础。该系统方案可广泛应用于教学实验、小型自动化设备及模型制作等场合,具有较高的实用价值和推广意义。
如若转载,请注明出处:http://www.asbpq1688.com/product/24.html
更新时间:2026-06-18 04:26:01